
Sensor ultrasonik sudah dikenal selama beberapa dekade terakhir dan perangkat ini terus memegang peranan penting di bidang pemindaian karena spesifikasi, keterjangkauan, dan fleksibilitas yang dimilikinya.
Seiring dengan kemajuan industri otomasi, penggunaan sensor ultrasonik di berbagai teknologi terkini, seperti drone, kendaraan EV mulai bermunculan.
Pada tahun 1914, Fessenden mengembangkan transduser modern pertama yang digunakan dalam sonar, di mana ia dapat menemukan benda-benda di dalam air tetapi bukan mengetahui posisi benda-benda tersebut. Dan kemudian pada tahun 1915 Langevin memperkenalkan model ultrasonik kontemporer yang menyelesaikan masalah Fessenden.
Pengertian sensor ultrasonik, spesifikasi dan cara kerja sensor ultrasonik pada modul arduino serta kelebihannya akan dijelaskan di artikel berikut ini.
Pengertian sensor ultrasonik
Sensor ultrasonik adalah perangkat pemindai yang bisa menghitung jarak obyek dengan memancarkan gelombang suara ultrasonik dan mengubah gelombang tersebut menjadi sinyal listrik. Kecepatan gelombang ultrasonik yang dipancarkan memiliki kecepatan rambat yang lebih cepat dari kecepatan suara yang terdengar.
Terdapat dua elemen penting pada sensor ini, yaitu : modul pemancar dan penerima. Modul pemancar menghasilkan suara menggunakan kristal piezoelektrik. Selanjutnya dari sana ia bergerak ke obyek dan kembali ke modul penerima.
Untuk mengetahui jarak antara obyek dan sensor, sensor menghitung lamanya waktu yang diperlukan gelombang ultrasonik dari pemancar ke penerima. Perhitungan dilakukan sebagai berikut:
D = 1/2 T * C
Di mana ‘T’ adalah waktu yang diukur dalam detik
‘C’ adalah kecepatan suara = 343 diukur dalam mts/dtk
Prinsip kerja sensor ultrasonik mirip dengan sonar atau radar yang mengevaluasi keberadaan obyek dengan menganalisa gema yang diterima dari gelombang suara/radio. Sensor ini menghasilkan gelombang suara frekuensi tinggi dan menganalisis gema yang diterima dari sensor . Sensor mengukur interval waktu antara gema yang ditransmisikan dan diterima sehingga jarak ke target bisa diketahui.
Spesifikasi Sensor Ultrasonik
Mengetahui spesifikasi sensor ultrasonik akan membantu dalam menghasilkan perkiraan pengukuran jarak yang lebih baik.
| Spesifikasi | Keterangan |
|---|---|
| Jarak Pindai | 40 cm – 300 cm |
| Waktu Respon | 50 ms – 200 ms |
| Lebar Jangkauan | 5° |
| Tegangan Operasional | 20 VDC – 30 VDC |
| Akurasi | ± 5% |
| Frekuensi | 120 KHz |
| Resolusi | 1 mm |
| Tegangan Output | Max. 10VDC |
| Berat | 150 gr |
| Suhu Kerja | -25°C – +70°C |
| Dimensi obyek | Max. 5 x 5 cm |
Mengenal Sensor Ultrasonik Arduino
Berikut ini adalah penjelasan antarmuka sensor ultrasonik yang biasa digunakan pada proyek Arduino yang memiliki tipe HC-SR04. Admin akan mejelaskan pinout sensor ultrasonik HC SR04, spesifikasinya, diagram pengkabelan, dan cara menghubungkannya dengan Arduino.
Konfigurasi pin sensor ultrasonik HC-SR04 adalah sebagai berikut :

- Vcc = Supply tegangan 5V DC
- Trig = Menerima sinyal triger dari arduino
- Echo = Mengirimkan sinyal ke arduino
- GND = Terhubung ke ground
Gambar di bawah ini menunjukkan diagram blok sensor ultrasonik untuk pengukuran jarak.

Jarak obyek dihitung menggunakan sensor jarak ultrasonik dan output dari sensor diberikan ke bagian pengolah sinyal untuk kemudian diproses menggunakan mikrokontroler Arduino . Hasil dari mikrokontroler diumpankan ke layar LCD untuk ditampilkan dan kemudian dipindahkan ke memori atau perangkat lain.
Sensor ultrasonik dapat dihubungkan ke motor servo untuk mengetahui jarak kutub sensor hingga sekitar 1800 putaran.
Cara kerja sensor ultrasonik HC-SR04
Secara umum sensor ultrasonik memiliki dua bagian yaitu transmitter dan receiver. Bagian-bagian ini ditempatkan pada jarak yang dekat, sehingga arah gelombang ultrasonik berada dalam garis lurus dari pemancar ke target dan modul receiver atau penerima. Membuat jarak minimal antara modul pemancar dan penerima bertujuan untuk meningkatkan akrasi saat penghitungan jarak suatu obyek.

Perangkat ini juga disebut transceiver ultrasonik karena bagian pemancar dan penerima digabungkan dalam satu unit yang sangat meminimalkan jejak PCB.
Di sini, sensor beroperasi sebagai sinyal burst dan ditransmisikan untuk beberapa periode waktu. Kemudian transmisi berada pada kondisi periode diam. Periode ini disebut sebagai waktu respon . Waktu respons menandakan bahwa ia sedang menunggu gelombang yang dipantulkan.
Bentuk gelombang akustik yang keluar dari bagian pemancar menyerupai bentuk cahaya yang dipancarkan dari laser sehingga sudut pancaran dan penyebarannya harus diukur. Ketika gelombang suara menjauh dari pemancar, area deteksi meningkat secara vertikal dan ke samping juga. Karena area deteksi yang bervariasi, spesifikasi cakupan dianggap sebagai sudut pancaran atau beamwidth selain area deteksi standar.
Lebih disarankan bagi Anda untuk mengamati pola sudut pancaran dari sensor, apakah itu sudut pancaran lengkap atau sudut variasi yang sesuai dengan garis lurus yang membentuk transduser . Umumnya, sudut pancaran tipis menghasilkan rentang deteksi yang lebih tinggi, dan sudut pancaran yang lebih luas sesuai dengan rentang deteksi yang lebih rendah.
Sinyal gelombang ultrasonik yang dipancarkan mungkin akan menemukan hambatan atau tidak. Ketika ada halangan apapun, gelombang tersebut akan dipantulan oleh obyek halangan itu. Sinyal yang terpantuil ini disebut ECHO atuu gema yang akan bergerak ke modul penerima.
Selanjutnya, sinyal yang diterima disaring atau diperkuat dan kemudian diubah menjadi sinyal digital. Dengan adanya waktu antara transmisi dan penerimaan gelombang ultrasonik, jarak antara sensor ultrasonik dan obyek atau halangan dapat diketahui.
Diagram periode waktu pada sensor ultrasonik
Di bawah ini adalah diagram waktu sensor ultrasonik .
Untuk mengoperasikan sensor ultrasonik HC-SR04, kita mesti menyediakan pulsa pemicu atau triger. Triger ini menghasilkan gelombang suara ultrasonik dengan frekuensi 40 kHz. Pada kondisi ini membuat pin ECHO berada pada kondisi status HIGH. Pin echo akan tetap dalam kondisi HIGH sampai sensor menerima gelombang suara ECHO atau pantulan dari obyek.
Oleh karena itu, lebar pin gema dinyatakan sebagai waktu bagi gelombang suara bergerak terpantul dari suatu objek dan menuju ke sensor.
Jangkauan HC-SR-04 adalah 2 cm – 400 cm.
Gambar di bawah ini menunjukkan diagram waktu HC-SR-04.
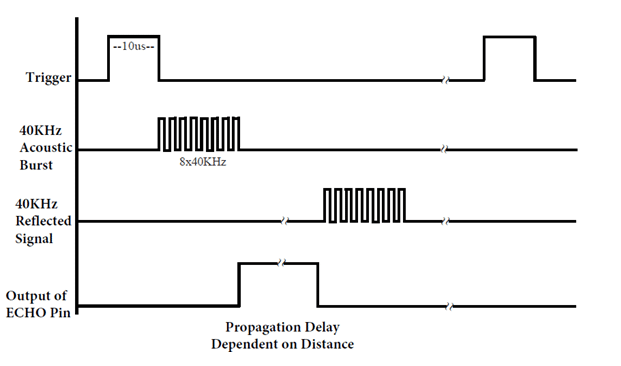
Diagram Waktu Sensor Ultrasonik
Prosedur untuk menganalisis diagram waktu:
- Ke pin Trig, pulsa pemicu harus disuplai setidaknya selama 10 sec.
- Kemudian perangkat secara otomatis mentransmisikan delapan pulsa 40 kHz dan menunggu tepi naik muncul pada pin output.
- Ketika pin echo mengamati tepi yang naik, mulai timer dan amati waktu yang diperlukan untuk memunculkan tepi jatuh pada pin echo.
- Ketika pin echo menunjukkan tepi jatuh, amati hitungan timer. Hitungan timer menunjukkan waktu yang dibutuhkan oleh sensor untuk mendeteksi objek dan kembali dari objek.
Seperti yang kita ketahui bahwa
D = S * T
D = Jarak
S = Kecepatan
T = Waktu
Jarak total diukur sebagai = (343* Waktu di HIGH ECHO)/2
Catatan: ‘343’ dalam rumus di atas menunjukkan kecepatan suara di media udara yang dipertimbangkan pada suhu kamar.
Jarak total dibagi 2 karena gelombang suara merambat dari sumber ke benda dan kemudian kembali ke sumber.
Kode untuk sensor ultrasonik dengan Arduino dijelaskan sebagai berikut:
Kode program arduino untuk Mengukur Jarak
/****************************************
Pengukur jarak dengan sensor Ultrasonik
HC-SR04 | Arduino UNO
---------------------------
Vcc | 5V
Gnd | GND
TRIG | 2
ECHO | 3
www.ardutech.com
*****************************************/
int trig_pin = 2;
int echo_pin = 3;
long echotime;
float distance;
void setup() {
Serial.begin(9600);
pinMode(trig_pin, OUTPUT);
pinMode(echo_pin, INPUT);
digitalWrite(trig_pin, LOW);
}
void loop() {
digitalWrite(trig_pin, HIGH);
delayMicroseconds(10);
digitalWrite(trig_pin, LOW);
echotime= pulseIn(echo_pin, HIGH);
distance= 0.0001*((float)echotime*340.0)/2.0;
Serial.print(distance);
Serial.println(" cm");
delay(2000);
}
Faktor-faktor yang Mempengaruhi Sensor Ultrasonik
Penampang radar membantu untuk mengetahui seberapa baik target memiliki kemampuan untuk memantulkan gelombang ultrasonik dan mengirimkannya kembali. Benda miring/melengkung menyebarkan sebagian besar sinyal ultrasonik yang ditransmisikan menuju target dan seingga menghasilkan respons gema yang minimal. Sedangkan permukaan seperti halus, datar, padat, dan besar memberikan respons gema yang kuat.
Target kecil atau target yang sedikit membelokkan suara seperti manusia, hewan, dan tumbuhan menghasilkan respons penginderaan yang minimal. Untuk menghasilkan respons penginderaan yang lebih tinggi, target datar harus mengarah ke sensor pada sudut 90 0 . Namun, permukaan kaku/kasar menunjukkan deviasi sudut yang lebih besar.
Keuntungan dan Kerugian Sensor Ultrasonik
Sensor ultrasonik banyak digunakan karena kelebihan sebagai berikut:
- Perangkat ini tidak terpengaruh oleh warna target.
- Perangkat menunjukkan fleksibilitas dalam rentang pengukuran jarak di mana ia memiliki kemampuan pengukuran dalam kisaran beberapa sentimeter hingga lima meter.
- Ini memberikan hasil yang konsisten dan menunjukkan keandalan yang tinggi.
- Perangkat memiliki presisi tinggi.
- Pengukuran dapat dilakukan setiap detik sehingga menunjukkan kecepatan refresh yang cepat.
Kekurangan
Meskipun sensor ultrasonik menggunakan teknologi serbaguna, ada beberapa kekurangan yang harus diperhatikan :
- Karena kecepatan suara bisa dipengaruhi oleh kelembaban dan suhu, keadaan lingkungan mungkin menunjukkan dampak pada akurasi saat mengukur jarak.
- Umumnya hanya tepat diaplikasikan pada proyek kecil.
- Sensor ini tidak akan berfungsi dalam ruang hampa.
- Sensor akan terkena kotoran, basah, dan beku yang mengakibatkan kesalahan saat mengukur atau fungsi akan terpengaruh.
Pengggunaan
Contoh penggunaan sensor ultrasonik adalah:
- Digunakan dalam penginderaan robot untuk penentuan posisi lengan robot.
- Digunakan dalam desain washdown untuk secara konstan memperhatikan tingkat pengisian objek pada ban berjalan.
- Digunakan untuk mendeteksi objek.
- Diameter coil/roll dapat diketahui dengan sensor ultrasonik.
- Digunakan untuk menghindari tabrakan.
- Deteksi kedekatan .
Nah, itulah tadi penjelasan tentang cara kerja sensor ultrasonik, khususnya sensor ultrasonik yang sering digunakan pada proyek arduino, yakni sensor SC HR04. Semoga bermanfaat.
FAQ Tentang sensor ultrasonik
Di mana sensor ultrasonik digunakan?
Penggunaan utama sensor ultrasonik adalah sensor jarak di mana kita dapat menemukan sensor ini dalam domain perlindungan anti-tabrakan dan teknologi parkir mandiri kendaraan.
Berapa jangkauan sensor ultrasonik?
Rentang frekuensi operasi sensor ultrasonik adalah antara 30 kHz – 500 kHz.
Bisakah gelombang ultrasonik melukai manusia?
Ketika ada paparan gelombang ultrasound yang lama, itu menghasilkan gejala seperti sakit kepala, pusing, dan beberapa masalah pendengaran. Orang-orang dapat menemukan gejala-gejala ini ketika frekuensi gelombang ultrasound melewati 20 kHz.
Apa yang dapat dideteksi oleh sensor Ultrasonik?
Sensor ultrasonik digunakan untuk mendeteksi jarak untuk rentang target yang diperluas terlepas dari permukaan, warna, dan bentuk target.



{kind=link}